Overview :
- Lego Technic MOC
- completed 2013-12-07
- 1250 parts
- 1.5 kg
First article for my first real Lego MOC : my mechanical six-legged Elephant.


I built this for the 20th Techlug contest (this is my entry post, I ended up ranking 5th over 10 contestants). The specifications for the contest were :
- 6 legs (no more, no less),
- a steering system,
- motorized movement,
- an arm wich rotates and has 2 articulations,
- between 1000 and 2500 parts.
- compact design,
- two paces of walking,
- All functions motorized and remote controlled.
You'll see that it needed quite a few improvments to be good, but this was my first big Technic MOC.
I started by doing some chassis research and quickly found out what would be the key aspect of the MOC : being able to lift its own weight. Everyone else in the contest encountered this, as a matter of fact. As it needs to be motorized, it needs to have a BB which weighs more or less like a moon.

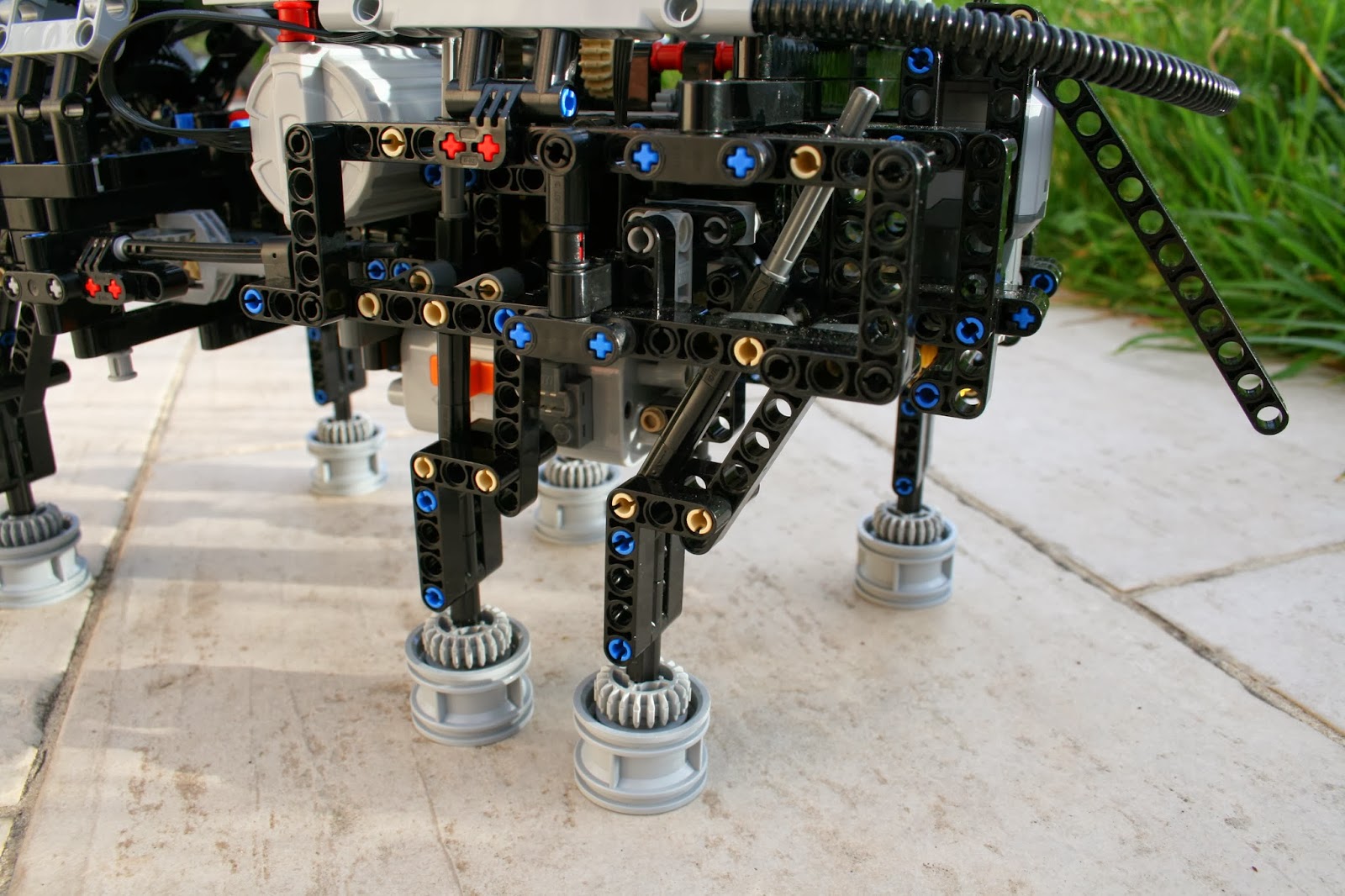 Being a kind of an elephant, the legs needed to be quite long to look realistic. Unfortunately, the thin and long design meant it was very fragile and quite not stable when walking, even less at high speed and if the floor was rough.
Being a kind of an elephant, the legs needed to be quite long to look realistic. Unfortunately, the thin and long design meant it was very fragile and quite not stable when walking, even less at high speed and if the floor was rough.It was moved by 1 or 2 XL motors, with a 6.6:1 ratio for pace 1 and a 3.3:1 ratio for pace 2. It was quite fast at high speed.
The steering mecanism wasn't very good either : it was actionned by 2 mini-LAs and the articulation was between the first and second pair of legs. They were too short to give it good steering capabilities. As a matter of fact, the resulting turning circle was a miserable 2 meters.
 The arm was in fact the head of the elephant : it could tilt up and down (mini-LA), rotate about 45° either side, the trunk had two articulations (mini-LAs) and the ears could flap. Each of these functions were activated by an M Motor. I liked those functions and it was fun to integrate them all in the head.
The arm was in fact the head of the elephant : it could tilt up and down (mini-LA), rotate about 45° either side, the trunk had two articulations (mini-LAs) and the ears could flap. Each of these functions were activated by an M Motor. I liked those functions and it was fun to integrate them all in the head.I loved the design and the "feel" of this MOC. It was a real challenge to build and I was glad to do it. It needs to be redesigned to be fully playable but I like what I have done.
Here's a video showing the (poor) capabilities of this MOC :
More pictures :
 |
| Driving mechanism |
 |
| Head rotation mechanism |
 |
| Head tilting mechanism |
 |
| Driving motors |
 |
| Remote control |
Very nice job for a first MOC ! The command is quite impressive too :)
ReplyDeleteAlexis